Intersection of 3 planes (HL)
See also intersection of 2 planes (HL)
We shall visualize a system of 3-variable linear equations as the intersection of 3 planes.
Contents
- Vectors refresher
- Cases
- Method using scalar triple product
- Method using row reduction
- Incorrect methods
- Calculators
Vectors refresher
Geometrically, is a plane or infinite flat surface. is the direction that the plane faces, and is called the normal vector. The specifies the particular plane out of the infinitely many parallel planes. For example, would be a parallel plane.
is the same (identical) plane as , as we just multiplied the equation by .
Two planes could either be identical, parallel, or intersecting. The intersecting line is perpendicular to both normal vectors.
Cases
When (at least) two planes are parallel, theres is no solution. This is most evident when you scale all planes to have the same coefficient in one of , , or .
Then, if two planes are identical, the third plane could be also identical or intersecting (because if it were parallel we would have known in the first step). This simplifies to intersection of 2 planes.
Finally, the three non-parallel planes could intersect at a point, intersect at a line, or do not intersect at all.
Suppose is one of three planes that meet at a line. If the is switched to any other number then there is an infinite family of no intersection.
Likewise, if any component of the normal vector is changed, such as from to , while remaining non-parallel to the two remaining normal vectors, the three planes would instead meet at a point.
In summary, the three cases that do not involve parallel or coincident planes are as follows. Note how the blue plane changes between the cases. Here is any non-zero real number.
| diagram | # sol’n | normals | row in matrix |
|---|---|---|---|
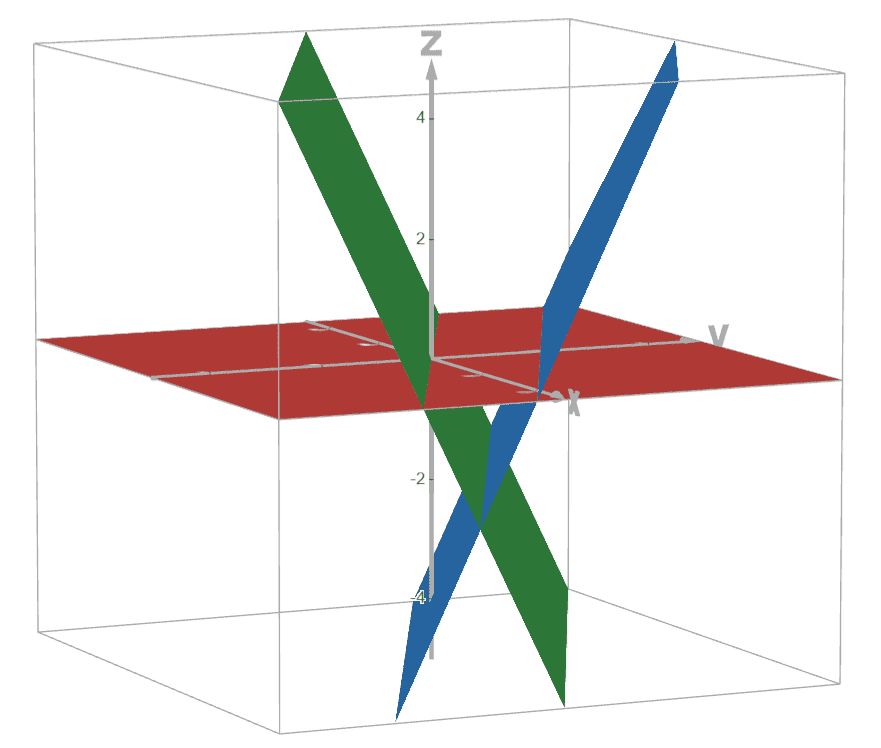 | |||
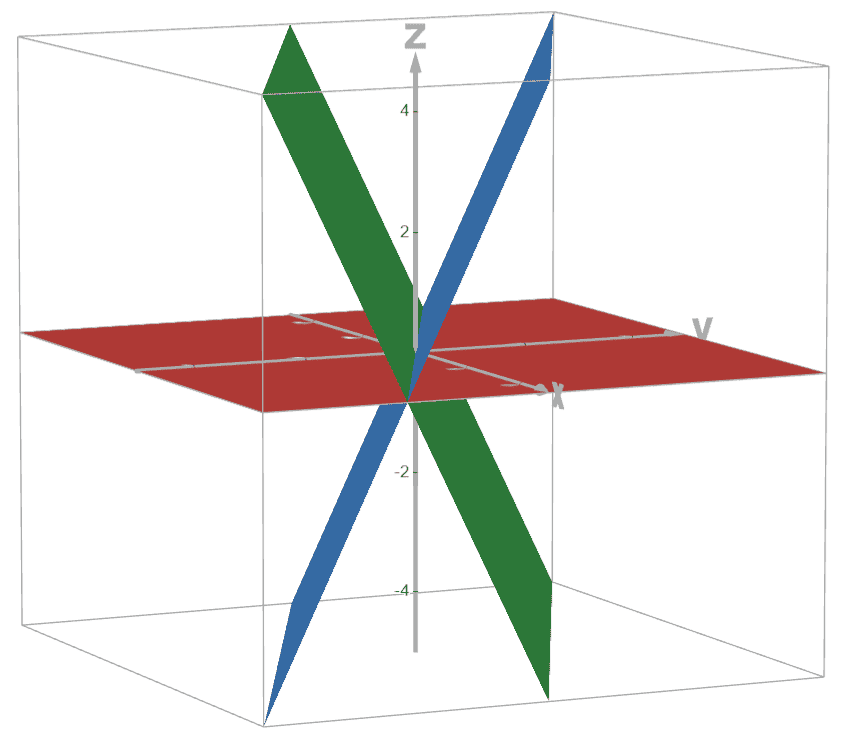 | |||
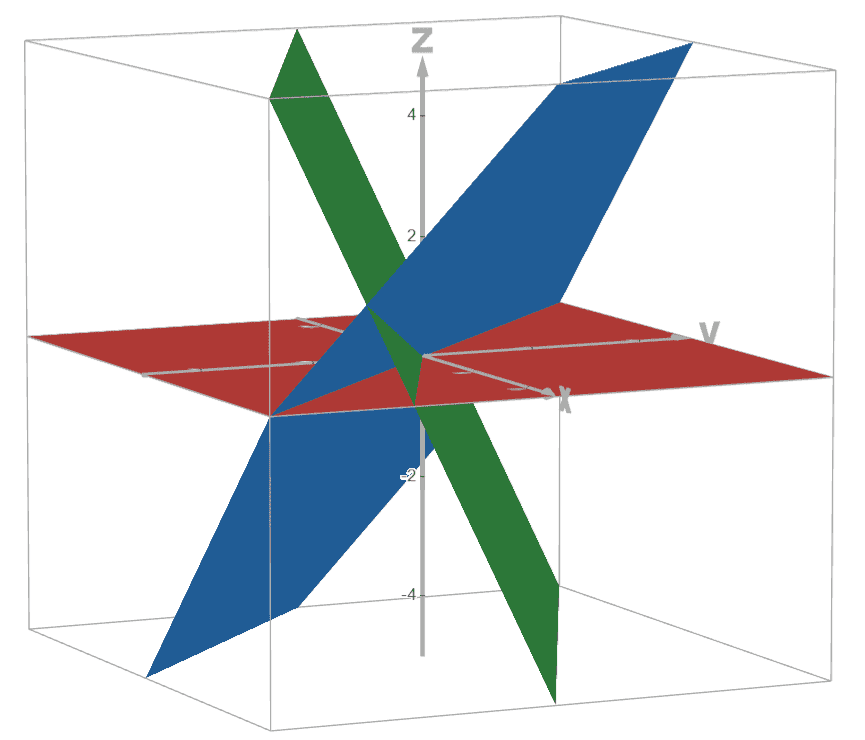 | 1 |
We present two methods, extensions from the two methods presented in intersection of two planes. The last two columns are explained below. They apply for other cases with zero or infinite solutions as well.
Method using scalar triple product
This method assume knowledge of scalar triple product and equations of lines
The scalar triple product produces a scalar value, whose absolute value is the volume of the parallelepiped (a skewed rectangular prism) spanned by the three vectors.
When the scalar triple product of the three normal vectors of the three planes is , the three normals are coplanar, meaning the system has no or an infinite number of solutions. If it is non-zero, there is a unique solution.
Example: Find and such that the system has an infinite number of solutions.
The scalar triple product can be evaluated in any order, but it may be off by a negative sign. Since we just want to set it to 0, the order does not matter. Because cross product is harder, we do it first with the known normals.
Now set the dot product between this and the remaining normal, to 0.
To find missing constant we require the solution to the system. Because all normal vectors are in different directions, and that there are infinite solutions, we have a line of solutions with a direction vector through a particular point.
Because the intersection line is perpendicular to all three normals, its direction vector is , as the result of cross product is perpendicular to both vectors.
To find a point on this line, we take the component of that is and set the corresponding component of to an . Let’s say .
Tip: Because , setting ensures integer components for the point. If we had set , we’d have a chance of having to working with fractions.
Note: If a component of is , do not guess the corresponding component of the point.
To find and , we solve a system of equations using our two known planes at this point. Subscripts are used for clarity. You do not need to use subscripts in your solutions.
and our guess of simplifies the system down to
The point is a solution and is on all three planes.
So it is on .
The planes intersect at .
Tip: There would be exactly one solution for and no solutions for .
In summary, missing coefficients on the left side can be found using the scalar triple product; whereas missing constants on the right side require the precise solution. The scalar triple product is only useful in finding the missing coefficient, and is not needed when coefficients are all given.
The example above told us about infinite solutions, which in this case is a line of solutions. Had we not known that, we would have to find the intersection between the line and the third plane.
Method using row reduction
Using row operations is another reliable method. Each elementary row operation uses the rows from the previous step.
In the reduced echelon form, the last row tells us about number of solutions. See intersection of two planes#row reduction for row reduction rules.
| example | interpretation | number of solutions |
|---|---|---|
| no solutions | ||
| one solution | ||
| infinite number of solutions |
Furthermore, if any row looks like one in the table, then the interpretation applies as well.
Example: Find and such that the system has an infinite number of solutions.
The system can be represented as an augmented matrix.
The goal, for this question, is to get the first row to look like
where and are functions (expressions) of and respectively, using some row reduction
By inspection, this can be done by .
For more complex situation, you may need to solve a system of two-variable equations, such as
for the multipliers and that cancel out the and in the first equation. Here we obtain
Then in a single step
There are infinite solutions when we have a row of all zeros
and that happens at
To actually find the solutions, row reductions need to be done in full, reaching the row echelon form for zero or infinite solutions, and the row-reduced echelon form for exactly one solution.
The row echelon form looks like
Though ideally you want it in the form of
where at least two columns on the left have at most one one and rest zeros. This above matrix is interpreted as
Example: Solve
The system can be represented as an augmented matrix.
Subtract the second equation by twice the first, and subtract the third equation by thrice the first.
Tip: Typically we proceed by making second column (the ’s) second row contain only a 1, but it’s much easier here to make third column to only contain a 1.
A row of all zeros means a line of solutions. An empty row with a non-zero value on the right means no solution.
The equivalent equations are
let , as is common to both equations. The goal is to reduce down to a consistent system of two equations.
Assume a point whose component is .
These are a set of parametric equations for the line of solutions.
In summary, the method of row reductions is often easier and more systematic. It is the recommended approach according to IB. The only time scalar triple product can be faster is when you need to solve for two coefficients and find the solution(s), which is pretty much never.
Incorrect methods
Method such as inverse matrices or Cramer’s rule are inappropriate for AA HL, because they only work for 3-variable systems with a unique solution. That’s like trying to solve all quadratics by factoring.
Calculators
This page focuses on Paper 1, ie solving by hand. When all coefficients are known, this could also be solved on calculators. For example on TI-84 Plus, use the PlySmlt App allowed on exams. On others without a dedicated app, you may use the rref matrix operator, but most will have an app.